步科两相步进电机介绍 57系列两相步进电机的介绍
2020-05-13 04:26:27
来源:朵拉利品网
1, 57系列两相步进电机的介绍

两相步进电机的使用:1、步进电机的相数是指电机内部的线圈组数,目前常用的有二相、三相、四相、五相步进电机。电机相数不同,其步距角也不同,一般二相电机的步距角为1.8度、三相为1.5度、五相的为0.72度。在没有细分驱动器时,用户主要靠选择不同相数的步进电机来满足步距角的要求。如果使用细分驱动器,则相数将变得没有意义,用户只需在驱动器上改变细分数,就可以改变步距角。2、两相步进电机在定子上只有两个绕组,有四根出线,整步为1.8°,半步为0.9°。在驱动器中只要对两相绕组电流通断和电流方向进行控制就可以了。3、步进电机并不能象普通的直流电机、交流电机在常规下使用。它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。4、步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。使得在速度、位置等控制领域用步进电机来控制变的非常的简单。5、步进电机应用于低速场合,每分钟转速不超过1000转,(0.9度时6666PPS),最好在1000-3000PPS(0.9度)间使用,可通过减速装置使其在此间工作,此时电机工作效率高,噪音低。 最好不使用整步状态,整步状态时振动大。
2, 两相步进电机原理?

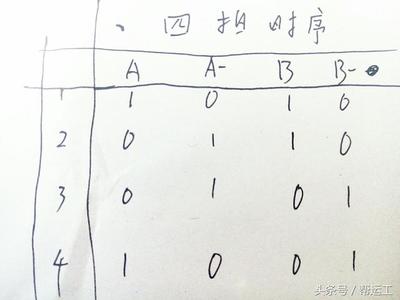
接线方法:两相四线的步进电机,有两个绕组:A,B。 A绕组通正向电流用(+A)表示;通反向电流用(-A)表示。 B绕组表示方法同上。 同电次序: 两相,四拍:(+A)(+B)--(-A)(+B)--(-A)(-B)--(+A)(-B)-- 单相,四拍:(+A)--(+B)--(-A)--(-B)-- 八拍,半步:(+A)(+B)--(+B)--(-A)(+B)--(-A)--(-A)(-B)--(-B)--(+A)(-B)--(+A)--
3, 两相步进电机的使用
如果遇到步进电机型号购买问题。可以从侧面了解,如机器出厂时间,用在什么设备什么,什么品牌的设备。配什么样的驱动器。几根线。如果还有其他讯息跟好。因为步进电机更新很快。单从型号去了解太片面。山洋闭环式步进系统(我们称它为山洋步进伺服系统-SANYO PB系列)特点:兼备交流伺服马达及步进系统优点的马达,结构小巧,可进行高速及高加减速运转,停止时无调整,性价比优异,最适合视觉系统。适用于机器视觉检测设备,标签机,液晶制造设备,小型雕刻机,机器人,半导体加工装置(绑定、编带、分选机…)等.1,SANYO DENKI可通过RS - 485通信也可以控制器(兼容其他品牌的控制器)控制,也可以输入指令,由驱动器控制。脉冲连接可以 控制多轴。所有的运动参数,可通过网络设置保存在Flash ROM中。提供在Windows 2000/XP系统下的编程运动库(DLL)。2,“位置表”用于主控制器的数字输入和输出信号的运动控制编程。你可以通过发送数位表,启动/停止,原点寻找或来自一个PLC的其他数字输入值,直接操作电动机。PLC 可监测来自驱动的定位完成信号,原点搜索,移动/停止,伺服准备和其他数字输出信号。驱动程序可最高256个定位点。3,SANYO DENKI是一种创新的闭环步进电机控制器,采用了高分辨率编码器,不断监测当前电机轴的位置。随着编码器反馈功能,每25微秒不断更新当前的位置信息。如果有必,速科伺服立即采取纠正措施,以弥补损失的步数。例如,由于负荷突然变化,处于失步状态,这是一个典型的步进电机的缺点。4,为了全面提高控制性能,调整了伺服系统的增益是最关键的一步。根据负荷变化的来调整参数,这是一项长期,繁琐,麻烦,耗时一个应用领域工程师的的很多的工作精力。速科步进伺服完全采用封闭步进电机控制回路的独特算法,消除这些繁琐的步骤,并给予工程师一个高性能伺服系统的效果。速科步进伺服是非常适合于低刚度负载(例如,皮带和滑轮系统),在大多数伺服系统中常见的问题是,在不同刚性负载的情况下伺服系统不能保持最佳的表现。速科步进无需繁琐调整即可在全范围内保持最佳伺服效果。5,与传统的伺服电机驱动相反,SANYO DENKI步进伺服利用步进电机的独特性能而使电机停止时没有调整问题,在达到理想的目标位置后,SANYO步进伺服无位置波动。此功能,尤其是在应用过程中非常有用。例如视觉系统中的定位后的振动问题。6,SANYO DENKI步进伺服是一种高精密伺服驱动器,标准的电机使用10000脉冲/转的高分辨率编码器。此外不同于传统的微步驱动器,SANYO DENKI步进伺服基于高性能DSP(数字信号处理器)执行矢量控制和过滤,实现平稳旋转及最小的震动。7,类似于传统的山洋步进电机,SANYO DENKI步进伺服具有良好的指令脉冲同步,实现了短暂和快速的定位反应,因此短距离快速动作是山洋步进伺服的独特特点。传统的伺服电机系统,在脉冲输入信号和反馈位置有不少延迟。因为当前的位置不断监测造成的位置调整,其调整需要等待一定时间,称为稳定时间。步进电机需要150~300毫秒,伺服电机需要40~60毫秒,山洋步进伺服只需要12~30毫秒。8,与普通山洋步进电机,山洋伺服在非常宽的速度范围内输出很大的力矩。驱动器可以做到在100%的负载时连续运行,无需担心电机驱动负载的能力,这与传统的微步(细分)驱动器完全不同。山洋伺服根据电机的转速,采用了独创的电流控制技术以做到高速范围依旧可以输出大力矩。9,山洋伺服在高速运行时没有失步问题。得益与当前的位置连续监测能力,山洋伺服即使在100%负载条件下也可产生高扭矩。
名词解释
绕组
线圈通常指呈环形的导线绕组,其电感量大小与有无磁芯有关,Q值愈高,回路的损耗愈小,广泛应用于马达、电感、变压器和环形天线等。
相关资讯
相关产品
- 25BY24咖啡机同步电机 饮水机步进电机 低功耗 耐高温
- 两相步进电机驱动器MD-2504数字式低噪音低振动低发热
- 【原装】上海鸣志MD-2522 数字型42步进电机驱动器 低噪音,低振动,低发热24-48V 包邮
- 真空伺服电机真空步进电机真空减速机用于真空高温深低温特殊环境
- 批发步进电机 雷塞专用微型精密伺服行星减速机生产厂家
- 方法兰高精密蜗轮蜗杆减速机步进电机 NMRV50配80伺服/86步进电机
- 35HS两相混合式步进电机 微型电动机 厂家直销 医疗器械用 NEMA14
- 热销推荐42BYGH行星减速步进电机 微型步进电机
- 供应奥托尼克斯步进电机、触摸屏、区域传感器A3K-S545(W)-S南京灿希贸易有限公司15365002408
- 直销 电缆卷筒碳刷总成 碳刷人字架 方钢2-相5相滑环电缆卷筒配件
最新资讯
相关企业